ժҪ
�R�^�dz���ϵ�y�OӋ��һ���M�ɲ��֡���ˣ����κι�W���̎����f���܉�Ԕ���������������������P��Ҫ�ġ�һ��������֪�IJ���Ӱ��ǻ�׃�������¹����ęM��λ�������ڽ�ƽ��ą���λ�õ�ƫ����@��ʹ�ð����У��҂���B��һ�����ߣ��������R�������о��@�NЧ����
��׃���x
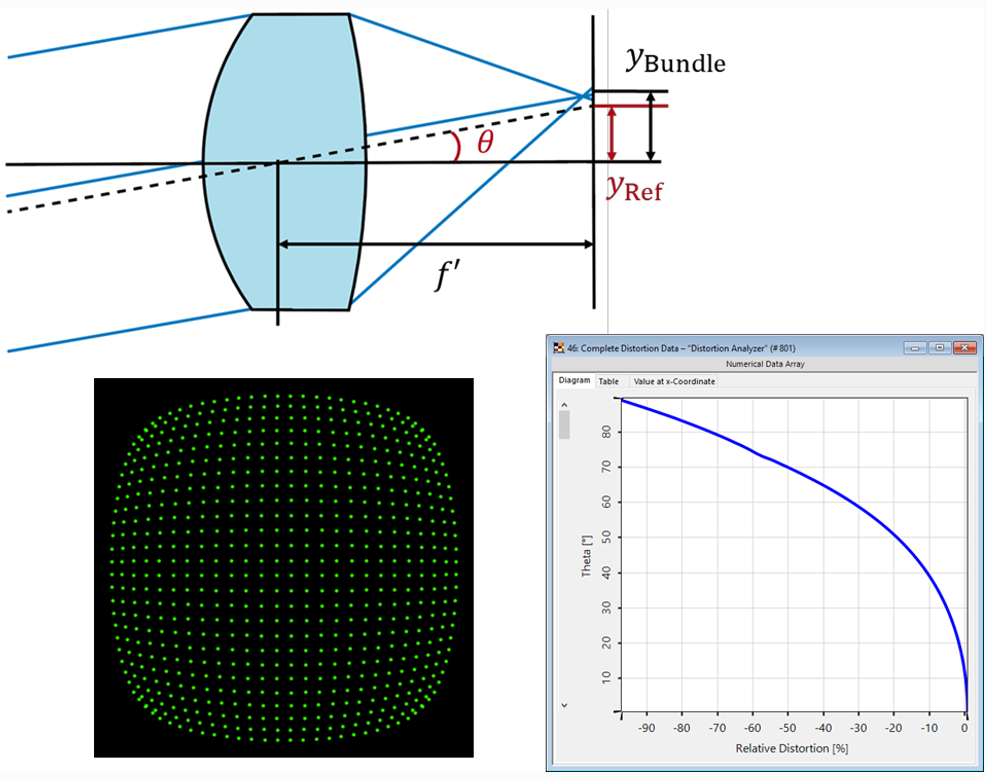
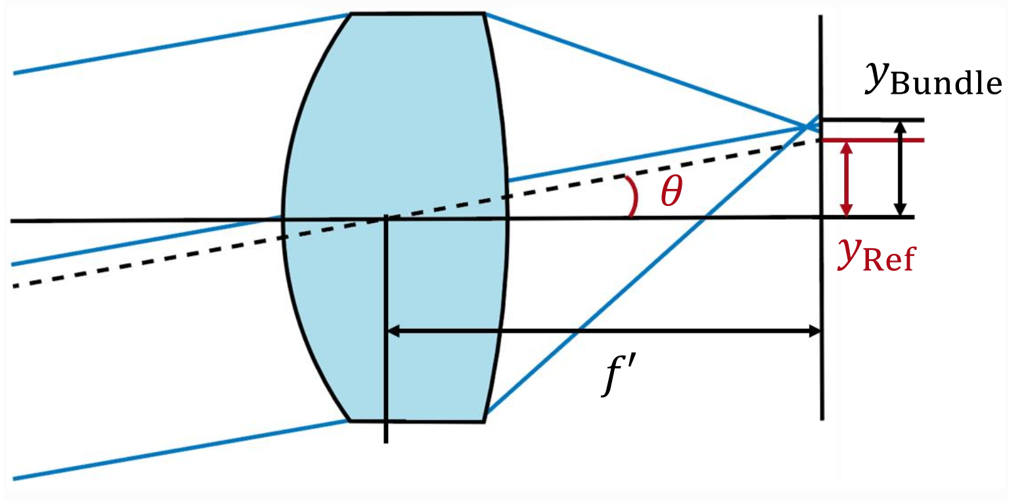
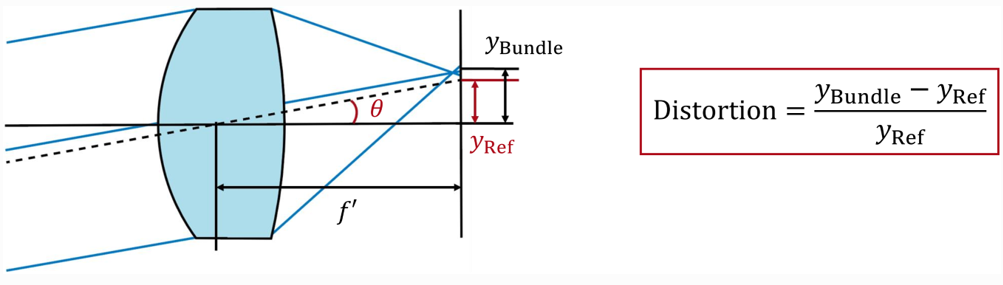
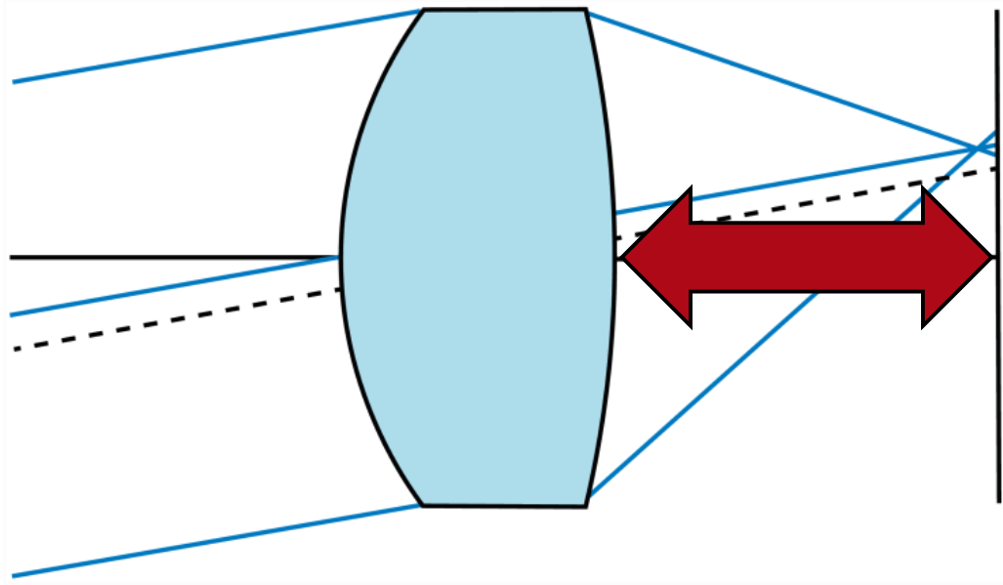
��׃�c���⾀������������������������x��⾀���ęM��λ�������ڽ�ƽ��ą���λ�õ�ƫ�ʹ�Ò����R�^����Ч���ࣨ𝑓'��������Ӌ�����ƽ��ą���λ�ã��@��Ҫȡ�Q������ǡ�
f’����Ч���ࡣ
θ������Ƕȡ�
yBundle���⾀���Ă���λ��
yRef�������⾀�Ă���λ��
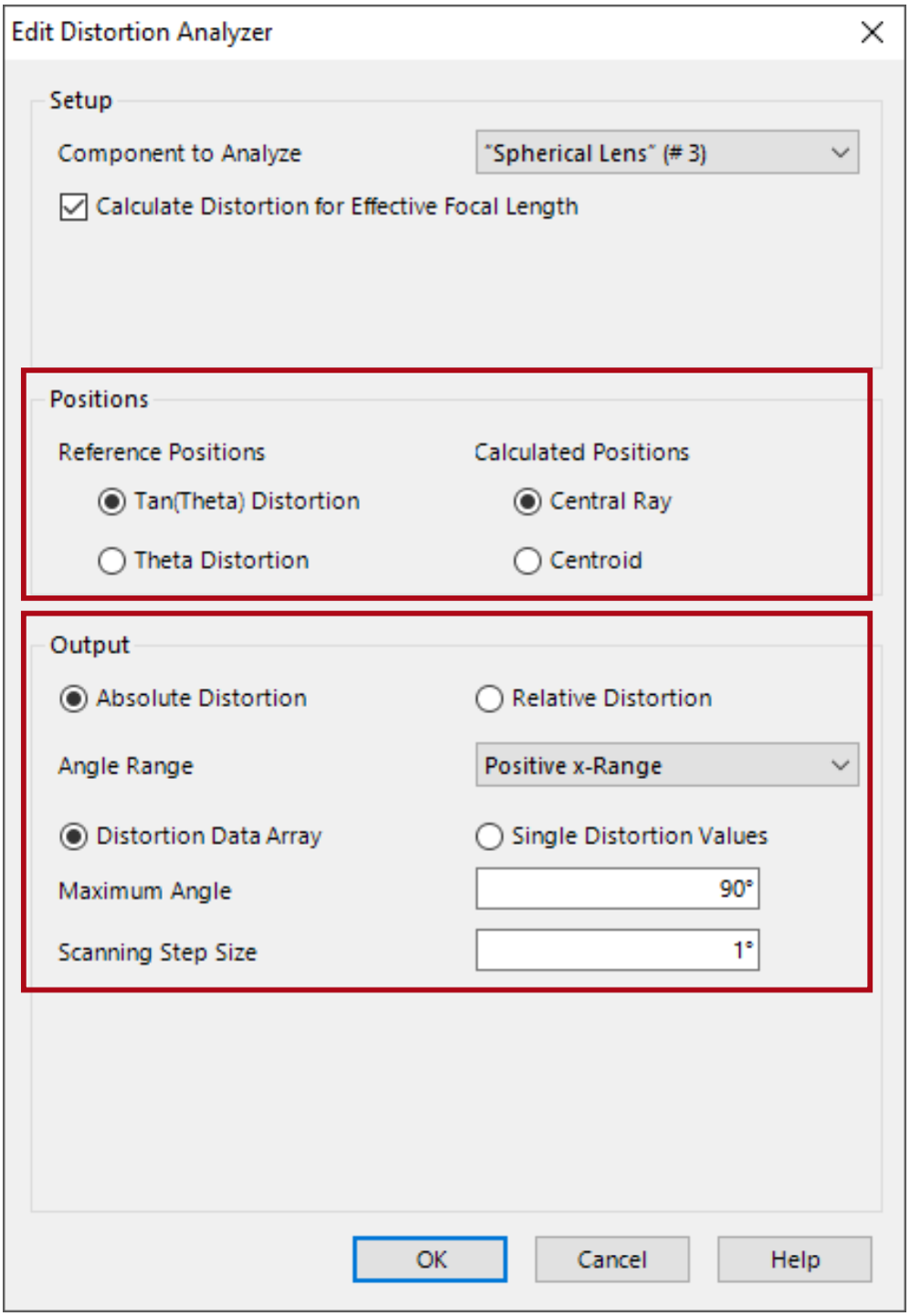
��׃���x
F-tan(theta)��׃��yRef=f’tan(θ)
F-theta��׃��yRef=f’θ
�⾀����λ�ã�𝑦Bundle����
- Central ray���B��ҕҰ�����c��ͫ������
- Centroid���c�������P�������������c
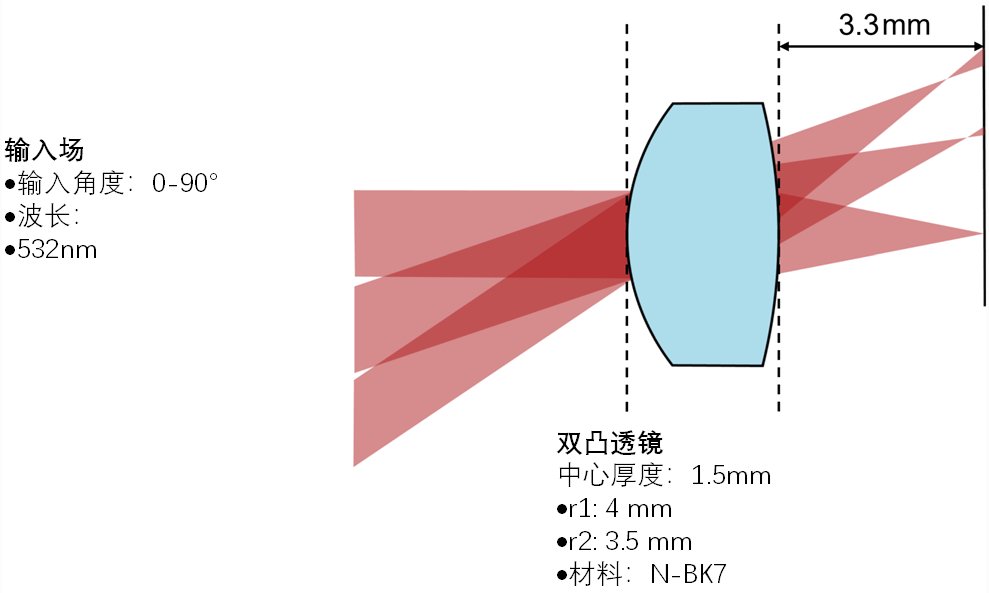
��������ҵ���׃������
Ҫ�����ĽM��
��׃������Ӌ�����R�����R�ڶ��x�ĽǶȷ���������Ĺ����Ļ�׃�����Ĺ��������ڌ��H�Ĺ�Wϵ�y���䅢������ˣ����w�ą�����Ҫ�ڷ������ȶ��x��
Ҫ�����ĽM�������x�������ĽM����һ�������ˆΌ��@ʾ���п��õ��x헡�����ж���������ͬ���Q�ĽM�����M������������������څ^��������
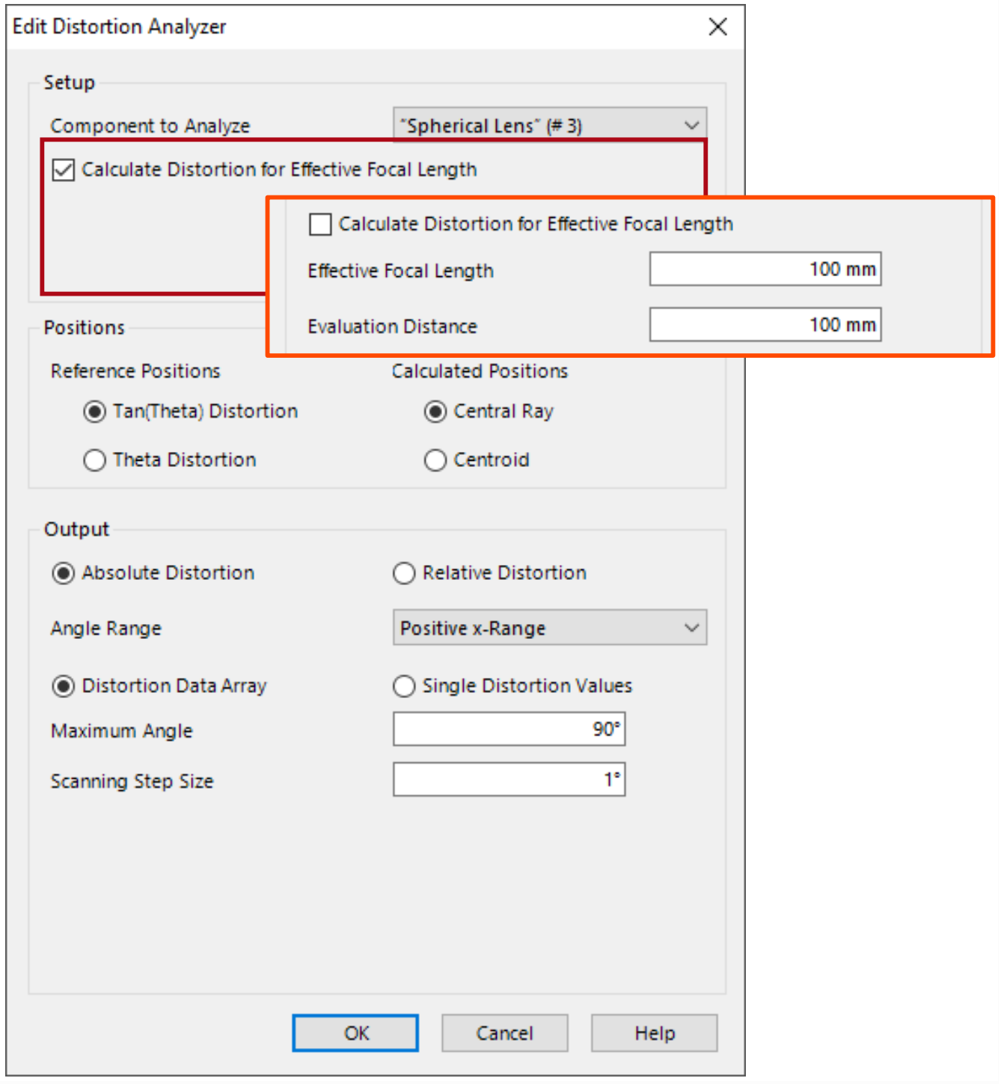
������
Ӌ����Ч�����ʧ�棺���ԓ�x헱��x�У���Ч���ࣨ𝑓′����ͨ�^�u�����x�M���ԄӴ_������t�����Ը����Ñ���Ҫ���O���u�����x��
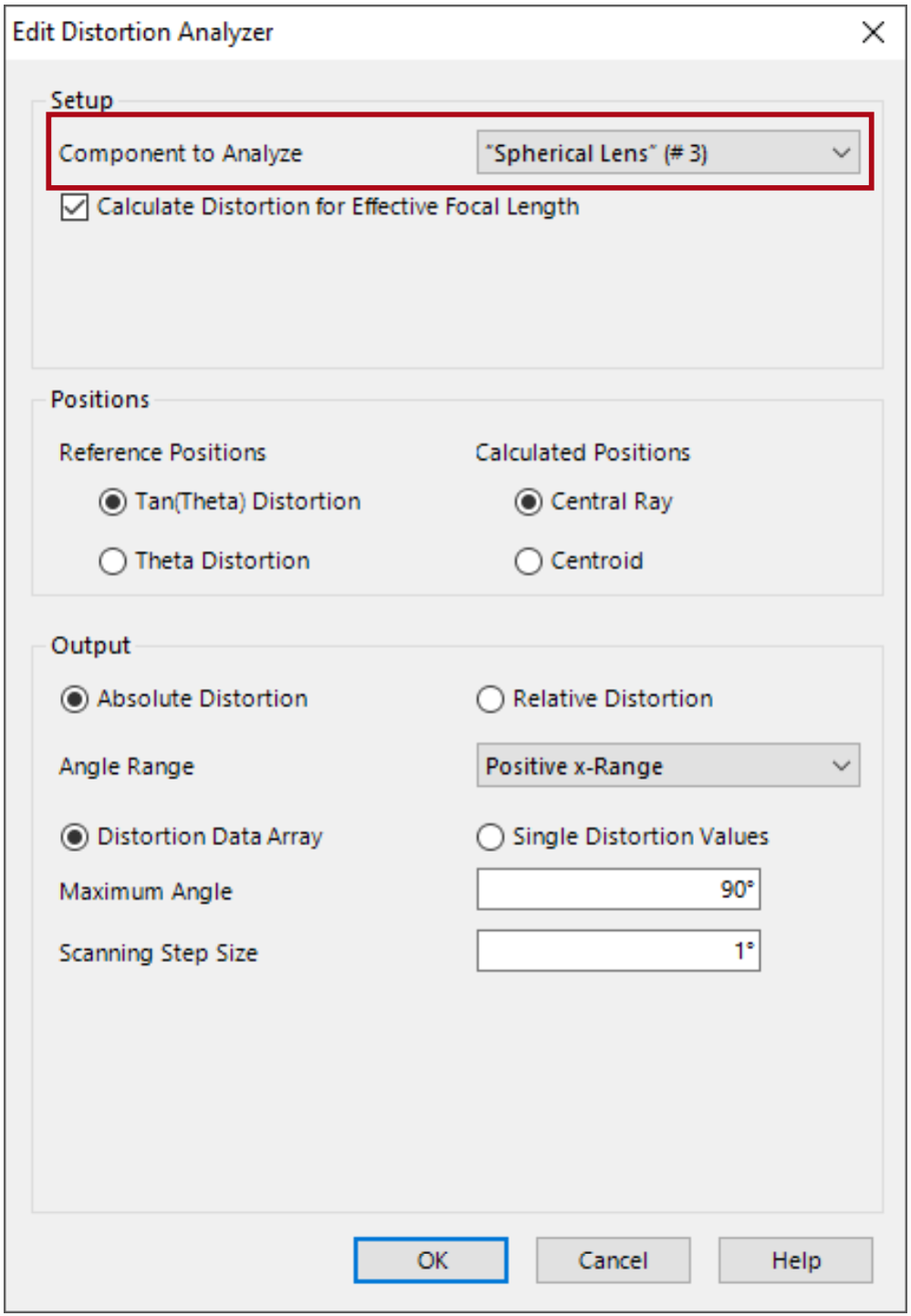
���������O��
λ�ã���׃��ͣ�Ҋ��4퓣�
- �����
- Ӌ��Ĺ⾀��λ��
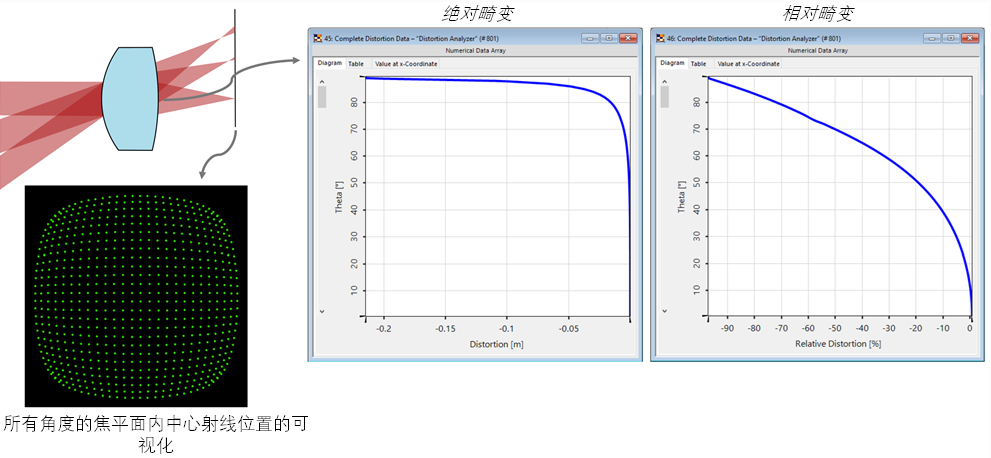
ݔ��(�Y���@ʾ)
- �^����׃[m]��������׃[%]
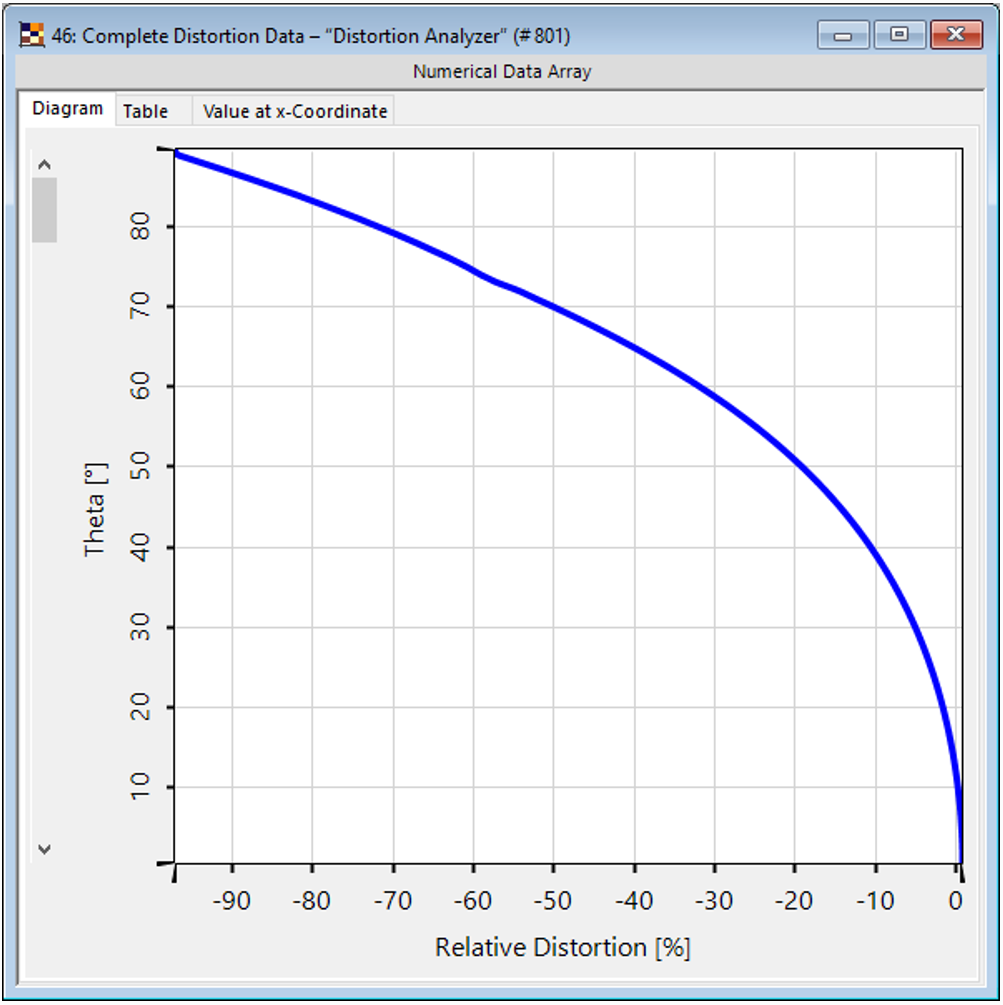
- �Ƕȷ��������x�����Ă���������׃���M����X�S��Y�S�����@�ɷN��r�¶�����ʹ������ؓ�ķ�������
- ��׃������У�����Ԓ���һ�������ĽǶȷ������Y���Ԕ�����е���ʽ����--���ϵ�y�Ĺ�Դ�l��һ�����ϵIJ��L���t�Ԕ�����м�����ʽ���ء�
- ��һ��׃ֵ�����@�N��r�£�����ֱ���������P�ĽǶȡ��@�Nģʽ�����Å��������탞��ijЩ�ǶȵĻ�׃��
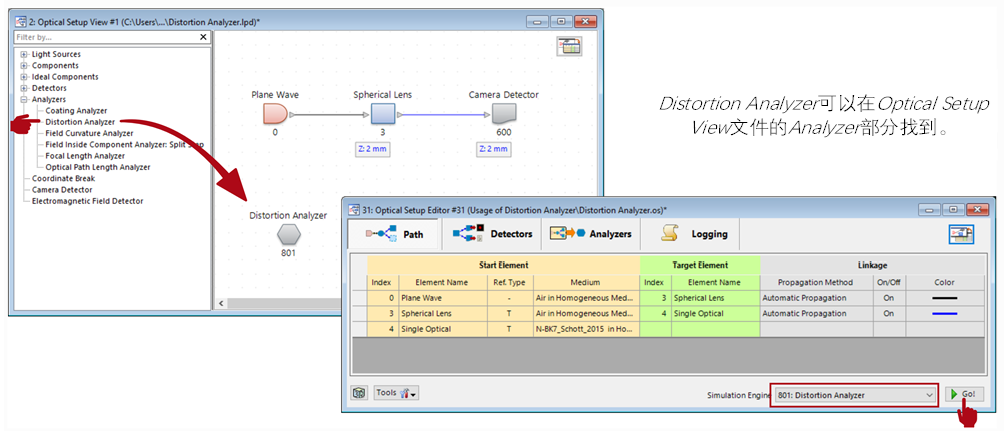
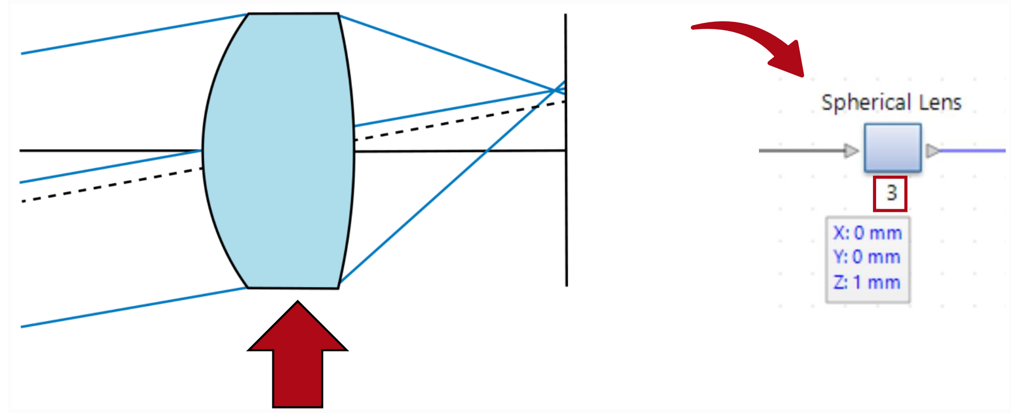
���ӣ����R�Ļ�׃
���ӣ�����R�Ļ�׃
|